
A aeronave não tripulada AqVS, desenvolvida no Centro de Estudos Aeronáuticos da UFMG, dentro do contexto do projeto SiDeVAAn, é um motoplanador de pequeno porte capaz de executar missões de reconhecimento de terreno e monitoramento. Atualmente com mais de 100 vôos autônomos, o AqVS foi a primeira aeronave brasileira a realizar vôos autônomos com tecnologia de controle totalmente nacional.
O projeto do sistema de controle do AqVS é baseado na filosofia de mínimos sensores, o que permitiu o desenvolvimento de um sistema de controle simples, de custo reduzido, e de grande confiabilidade. Este sistema utiliza um processador Intel XScale de 312 MHz o que permite que novas estratégias de controle e guiamento sejam testadas. Como sensores são utilizados: i) sensor barométrico, ii) sensor de atitude, iii) sensor de pressão diferencial e iv) GPS.
Dados Técnicos
| Envergadura | 2.00 m | Carga alar | - |
| Comprimento | 1.6 m | Velocidade de cruzeiro | 50 km/h |
| Área Alar | - | Velocidade de estol | - |
| Alongamento | - | Dist. Decolagem | H-L |
| Peso Vazio | 1.2 kgf | Teto Oper. | 150m AGL |
| Peso Total | 2.5 kgf | Raio Oper. | 10 km |
Imagens

Exemplo de mosaicagem automática gerada através de imagens captadas pelo AqVS em vôo autônomo
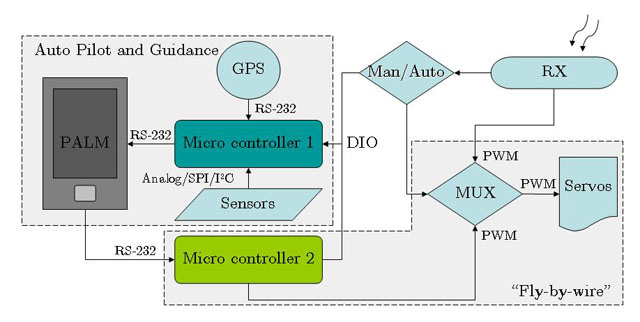
Detalhes do sistema de vôo autônomo utilizado no AqVS
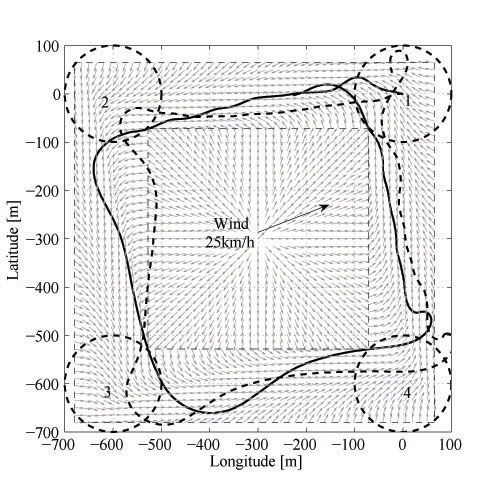
Comparação entre duas trajetórias autônomas voadas com diferentes algoritmos de guiagem
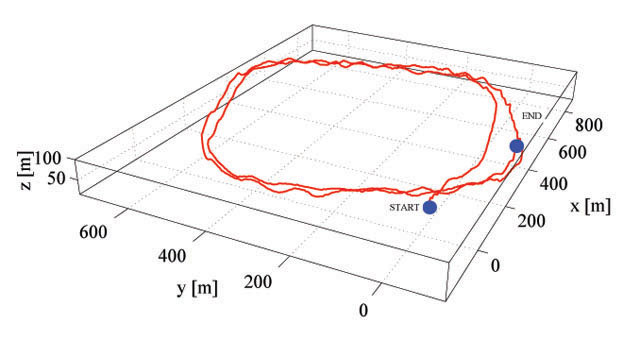
Exemplo de uma trajetória tridimensional.